

It prinsipe fan 'eskroef stappenmotorIn skroef en moer wurde brûkt om yninoar te gripen, en in fêste moer wurdt brûkt om te foarkommen dat de skroef en moer relatyf oan elkoar draaie, wêrtroch't de skroef axiaal bewege kin. Yn 't algemien binne d'r twa manieren om dizze transformaasje te realisearjen.
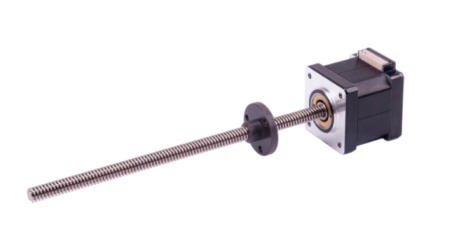
De earste is om in rotor mei ynterne triedden yn 'e motor te bouwen, en te realisearjenlineêre bewegingtroch it yninoar gripen fan 'e ynterne triedden fan 'e rotor en de skroef, wat in penetrearjende skroefstappenmotor neamd wurdt. (De moer is yntegreare mei de motorrotor en de skroefas giet troch it sintrum fan 'e motorrotor. As it yn gebrûk is, befestigje de skroef en doch anty-rotaasje, as de motor oanset wurdt en de rotor draait, sil de motor lineêr lâns de skroef bewege. (Krekt oarsom, as de motor fêst sit wylst de skroef anty-rotaasje makke is, dan sil de skroef lineêre beweging meitsje)
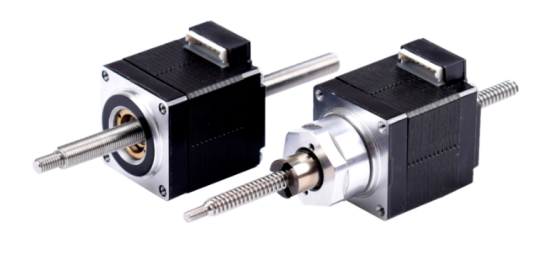
Troch-as type
De twadde is om deskroefas de motor út 'e as, yn 'e motor ekstern fia in eksterne oandriuwmoer en skroefferbining om lineêre beweging te realisearjen, dit is de eksterne oandriuwingstype skroefstappenmotor. It resultaat is in sterk ferienfâldige ûntwerp dat presyzje lineêre beweging yn in protte tapassingen direkt mei in skroefstappenmotor mooglik makket sûnder de ynstallaasje fan in eksterne meganyske ferbining. (De moer is ekstern oan 'e motor en is keppele oan it oandriuwmeganisme. As de motor draait, beweecht de moer lineêr lâns de skroef.)
Eksterne skiiftype
Tapassingsfoardielen fan lineêre stappenmotor mei troch-as:
Fergeliking fan de tapassingsscenario's wêrby't ekstern oandreaune lineêre stappenmotors brûkt wurde yn kombinaasje meilineêre liedingen, lineêre stappenmotors mei troch-as hawwe har eigen unike foardielen, dy't benammen werom te sjen binne yn 'e folgjende 3 aspekten:
1.Lit gruttere systeemynstallaasjeflater ta:
Yn 't algemien, as in ekstern oandreaune lineêre stappenmotor brûkt wurdt, sil minne parallelliteit tusken de skroef- en liedingbefestiging wierskynlik liede ta systeemstalling. Mei lineêre stappenmotors mei troch-as kin dit fatale probleem lykwols sterk ferbettere wurde fanwegen de strukturele skaaimerken fan it ûntwerp, dy't gruttere systeemflater mooglik meitsje.
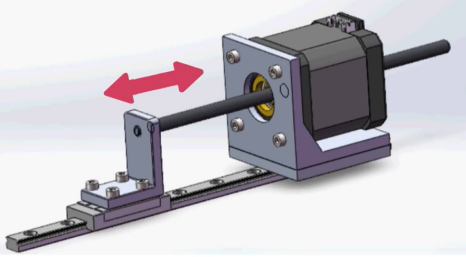
As de motor oanset wurdt, draait de moer mei de rotor en de skroef is ferbûn mei in eksterne lading en beweecht yn in rjochte line lâns de gids.
2.Net beheind troch de krityske snelheid fan 'e skroef:
As ekstern oandreaune lineêre stappenmotors selektearre wurde foar lineêre beweging mei hege snelheid, wurde se meastentiids beheind troch de krityske snelheid fan 'e skroef. Mei in lineêre stappenmotor mei troch-as is de skroef lykwols fêst en anty-rotaasje, wêrtroch't de motor de slider fan 'e lineêre gelieding oandriuwe kin. Om't de skroef stasjonêr is, wurdt er net beheind troch de krityske snelheid fan 'e skroef by it realisearjen fan hege snelheid.
3.Dit besparret ynstallaasjeromte:
De lineêre stappenmotor mei troch-as nimt gjin ekstra romte yn bûten de lingte fan 'e skroef fanwegen it strukturele ûntwerp wêrby't de moer yn 'e motor ynboud is. Meardere motors kinne op deselde skroef monteard wurde. De motors kinne net "troch" elkoar hinne, mar har bewegingen binne ûnôfhinklik fan elkoar. Dêrom is it in gaadlike kar foar tapassingen mei strangere romte-easken.
Foar mear ynformaasje, nim dan kontakt mei ús op fiaamanda@kgg-robot.comof+WA0086 15221578410.
Pleatsingstiid: 11 febrewaris 2025




